機架:Tarot 650

選用Tarot機身好處是全碳纖,周邊配件也多,未來要掛載雲台或者多顆電池,飛越本身都有很多配件可以流用。
飛控板:3DR 原廠 Pixhawk

玩過MWC後,在調整上感覺很費工夫,我想玩FPV,感覺目前多數都用APM或者NAZA,直到幾個月前看到有人討論Pixhawk,因為目前APM的8 bit運算硬體已到達極限,而Pixhawk的32bit有很大發揮空間,因此就被推入坑了...
Pixhawk是開源的硬體,所以對岸也有在賣,但跟原廠3DR還是有些許差異,在軟體安裝上可能也會遇到一些問題,所以建議還是跟3DR原廠購買,一方面也用經費支援這項開源,雖然會貴一點,但我相信是值得的。
馬達:朗宇 X4110S 340KV

會選擇340KV是因為未來這台四軸總重會約略在3公斤上下,所以選擇X4110S低KV的配法。
電變:好盈 OPTO 30A(已刷BLHeli)

會選擇這個純粹就是便宜又大碗,刷上BLHeli之後更大碗。
遙控: DEVO 10已刷deviation + RX1002

DEVO 10刷deviation也是純粹便宜大碗。
Update:目前我已換成Frsky X9D+,若預算可以提高,我非常推薦X9D+
其他周邊設備:
- 3DR u-blox GPS

玩多軸我想多數人都是會掛GPS,尤其要玩自懸/返航/航點...
- 3DR 915 MHz radio

這主要用途是數傳(數據傳輸),以前MWC使用手機App就可以輕鬆調整,但因為Pixhawk太複雜了,需要一套軟體來調整它,所以一般會用一台電腦裝上Mission Planner(簡稱MP)來控制,這台電腦簡稱地面站。你可以透過MP調整設定,可以在MP上面設定航點。傳統調整飛控都會透過USB傳輸線,但飛行器在空中飛不可能拉一條USB,所以透過915MHz這頻段的無線電訊號來傳輸。3DR有賣433/915兩種頻段,會選擇915是因為433這頻道未來會拿來做遙控器增程使用,所以就選擇915MHz,但915MHz靠近4G頻道,所以915MHz在使用上的距離約略一公里左右,對新手而言這已經很夠了。
Radio也可以接到手機,就可以玩Follow Me功能,你走到哪多軸就跟到哪。但目前App支援度沒有很高,目前我是使用Andropilot跟DroidPlanner兩套。
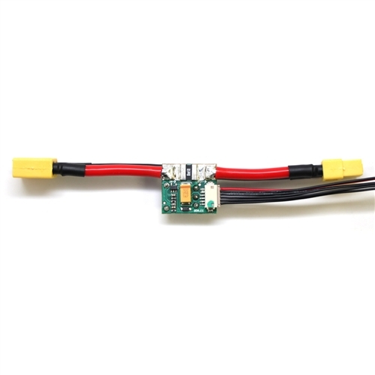
- 3DR PPM encoder

現在比較新的遙控器都支援PPM通道,也就是一條線接到飛控板就搞定,不用那個辛苦的ELEV/AILE...這樣一條條線接。但因為我的DEVO10+RX1002不支援PPM,所以就需要透過這個PPM encoder轉接,簡單說就是左邊的插頭插到Pixhawk,右邊這一堆插頭分別接到RX1002上面去,這在後面幾篇會教學。
- 非原廠APM/Pixhawk Power module
以前要讓飛控板通電,直接找個5V的電插上去就好,但因為Pixhawk支援電壓測量,在加上它很尊貴XD 如果從電變拉電源過來就太對不起它,另外一方面因為硬體上的設計,它需要輸入5.3V的電壓,所以個人建議,還是買專用的Power module,這個Power module我是從對岸買來的,雖然是商品名稱是寫給APM用,但後來我發現其實可以跟Pixhawk通用,有一些文件會寫APM的Power module的3、4 pin要對換才可以相容Pixhawk,但我測試後發現不用對調,直接插上就可以用。如果你發現不能用,可以嘗試把pin 3、4對換試試看,紅色線是Pin 1,依序數過去即可,交換Pin 3、4不會傷硬體。
為什麼會強調非原廠,因為原廠Power module不支援6S電池,所以跟我一樣用6S的電池,請不要購買原廠!!!!會燒掉Power module
- 可調式5V/12V分電板
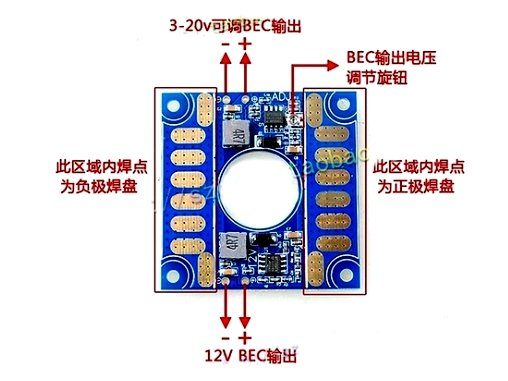
以上整個清單的電源供應就只有5.3V,但未來如果掛在相機/雲台/圖傳等等設備,可能會需要用到5V/12V,因此我選擇這塊分電板來使用。
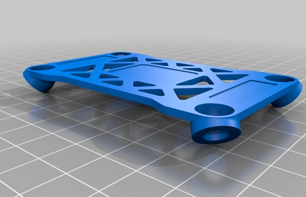
- 減震神器

傳說APM/Pixhawk對於震動很敏感,不可以隨便把飛控板直接鎖在機身上,因此有很多減震方法,懶得去搞,就直接買一個減震神器。
如果你跟我一樣有3D印表機,你可以直接自己列印,檔案在此,但因為我印出來後,買不到如上面圖片中的藍色軟墊,找到都是賣給雲台用的,所以我最後還是買現成的一整套。
- 1555蜻蜓尖翼正反槳 2對

依照網路的推薦,大機身的多軸選擇槳就兩種,一種是DJI的,聽說是最省電,另外一種就是尖翼槳,比較適合初期亂飛用,隨便調都好飛。
至於用幾吋槳,就依照馬達的推力跟重量去選擇。650機身一般用15或者17吋槳,也有人用18吋槳,但18吋兩槳距離只有一公分,可能在飛行調整上會不太穩定,也可能會掃到機身中央一些配件。
8. 6S 5000mAh電池
主要訴求是長時間飛行,所以高壓低電流就是最佳選擇,目前選用富力的電池,跟同樣規格比,體積跟重量都會小一點,在加上廠牌優勢,所以我選擇富力
您好,想請問一下,Pixhawk和APM,除了8 vs 32bits這個差別(雖然還搞不懂),實際功能上,有些什麼差異呢?還是有什麼比較性的文章可以介紹我閱讀,感謝。
回覆刪除如果只是單純拿來休閒玩樂,那差異性不大。
刪除Pixhawk/PX4軟體分兩支線發展,一個PX4原生,一個是APM,據說APM 3.2的軟體就是針對PX4/Pixhawk去發展,因為APM本身硬體已經接近極限,APM硬體已經無法跟上軟體。
但周邊的軟體,例如Mission planner,目前也只能用於APM韌體,我之前想試試看用Pixhawk的原生韌體,但地面站軟體只能用Qground,操作介面一點都不友善。
很多人會同時擁有兩套硬體,APM拿來單純玩樂,摔下來痛的程度也會比較小:P
會掛一堆貴重物品,例如單眼、投放器,訴求穩定度,那可以考慮用PX4/Pixhawk,但成本也會整個上升,光原廠飛控就要199美金
作者已經移除這則留言。
刪除Autonomous flying is obviously when you fly a model without having to touch any of the controls. If you want to do a lot of autonomous flying, It’s important to have a flight controller that has features like auto take off and landing, waypoint flying and data telemetry. It should also have open-source firmware so that you can later on add or improve features.
刪除The bad thing about the the NAZA flight controller is that the firmware can’t be modified in any way, so there isn’t any future expandability or extra features unless DJI comes out with a firmware update for it. That’s where something like the 3DR Pixhawk comes in. The Pixhawk from 3D Robotics is a flight controller designed specifically for Autonomous flying. The Pixhawk has more features then the NAZA flight controller, but the more important aspect about it is that all of the software/firmware from 3D robotics is open-source, so you can add things on to it and do whatever you want. So if you’re trying to do advanced research projects, getting something from 3D robotics is probably the way to go.
data source: http://myfirstdrone.com/tutorials/buying-guides/best-flight-controllers/
這是APM的github,你可以定期去看一下https://github.com/diydrones/ardupilot/blob/master/ArduCopter/ReleaseNotes.txt
回覆刪除這檔案近期幾版會一直出現一個字EKF(Extended Kalman Filter),這功能可以讓飛機用更高的精準度在定高平衡狀態,但限制就是飛控版得是Pixhawk,預設值是關閉。
我意思是軟體的發揮空間很大,隨時間不斷進版,但硬體總是會有瓶頸。但如果真的只是單純拿來飛行玩樂,那APM或者甚至是NAZA都是不錯選擇。
想請問玩家 大哥 您都去哪采買模型相關零件跟機構等等模型
回覆刪除請多多指教