

冬天來臨,又到了北部刮風下雨季節,只能在室內飛小多軸。
剛好看到國外網站在預購特價,就不小心買了。
簡單基本介紹
飛控版是 SP R3 EVO
預設韌體是CF 1.3.0
用的是2S電池,飛起來比JJ100還要暴力一些,在房間亂飛大概五分鐘就沒電
5.8G FPV,畫質基本上就是室內可用
相容我的Frsky X9D+,所以不需要在多買一個控

後來我就刷成最新版本BF,差異...我覺得比原本CF還要順且穩,但刷掉韌體後,設定都要全部重來,所以要注意一下。
冬天來臨,又到了北部刮風下雨季節,只能在室內飛小多軸。
剛好看到國外網站在預購特價,就不小心買了。
簡單基本介紹
飛控版是 SP R3 EVO
預設韌體是CF 1.3.0
用的是2S電池,飛起來比JJ100還要暴力一些,在房間亂飛大概五分鐘就沒電
5.8G FPV,畫質基本上就是室內可用
相容我的Frsky X9D+,所以不需要在多買一個控
後來我就刷成最新版本BF,差異...我覺得比原本CF還要順且穩,但刷掉韌體後,設定都要全部重來,所以要注意一下。


































現在市面上有許多433的產品,一開始最大宗是Hobbyking的OrangeRx,但是這一年Hobbyking沒有庫存,很多人都買不到1W的433發射模組,我之前介紹過的433整合數傳的作者發起一個Project,透過網路力量去畫一433電路並相容於他目前的韌體。
這是硬體的相關網頁 http://www.itluxembourg.lu/site/apmplane/ultimate-lrs-mini/
我好奇訂了幾塊空PCB版,我更虐待自己的是訂SMD版本,焊到我眼睛快脫窗。
這版本是舊版本,理論上差異不大,大多是線路安排的優化。但我也跟OrangeRx比較,發現空PCB的線路有省掉一些點沒接,但我不是學電子電路的,所以也不太知道這差異會多大。
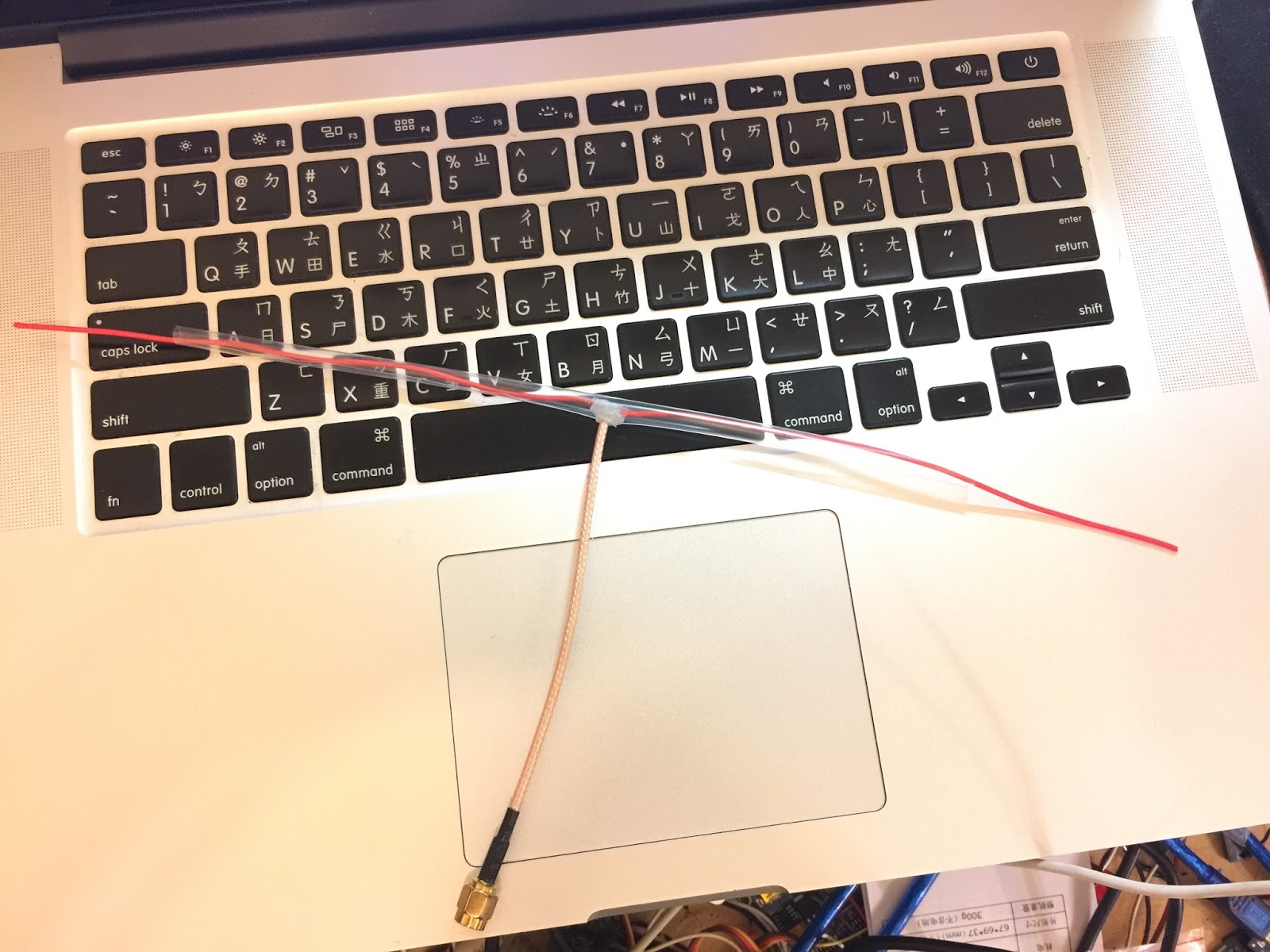
我做了簡單測試,把手工版本433和我之前購買的OrangeRx TX 1W來相比較,測試條件都一樣,同樣都把模組輸入電壓到6V最大,並使用同一組手工GP天線測試。
使用openLRSng定頻程式 https://github.com/openLRSng/openLRSng_tester,需要修改一下程式裡面腳位的定義,把運作頻率定在435並持續發送資料,透過大紅點儀器做簡單測量比較。

左圖是PCB手工版本,輸出功率只打出0.44W左右,但OrangeRX 1W TX同樣條件卻可以打出1W。
所以...省麻煩還是買OrangeRx TX 1W來玩吧。




在國外網站看到,有3D印表機的可以自己印下來卷。
網站連結 http://farvew.com/
它很貼心的把各種卷法檔案都包好了
http://farvew.com/content/category/3-STL
越多卷指向性越高,一般不太建議到12卷,可以從5、7卷嘗試看看。
最近在搞雲台跟機身震動問題,所以把我古董tarot 650的馬達座換成號稱有避震功能,其實就是在螺絲固定點多襯上一些硬塑膠,有點像避震球。
這新的馬達座單純就是靠上下兩片夾住16mm碳纖管,用兩根螺絲鎖住。標準程序就是鎖緊這兩根螺絲然後上點螺絲膠,靜置等待24小時。
因為之前舊的馬達座是靠四根長螺絲固定,現在突然只剩兩根,我心裡一直覺得怪怪的...
果然隔天我發現一個問題,也許是這碳纖管表面過於平滑,這馬達座上下兩夾板也很光滑,儘管我已經螺絲鎖緊了,用手稍微出力一扭,有一軸馬達座竟然滑動了~~~~~滑動~~~~~滑動~~~~~滑動~~~~~
幸好沒去飛,不然馬達座一鬆脫可就不得了阿...
在網路上找到一個小物,這其實是自行車組裝常用的東西,主要幫助碳纖維管增加摩擦力,背面說明書解釋會在碳纖管上產生些許刮痕增加摩擦力。
我抹上後,一樣靜置24小時,手用比開罐頭更大更大的力氣去扭動,馬達座聞風不動,好東西!
但我覺得根本解決辦法,未來要更換成方管,並直接在方管上鑽洞上鎖才是解決之道,目前就把這機身用到極致退休為止。
本篇教學屬於進階,個人不建議新手操作,有可能導致你的GPS無法運作,本教學純記錄。
本人有看到新版本不刷會渾身不對勁毛病,不小心看到M8N有新的韌體3.01,所以就下載下來刷刷刷! 看到更新日誌上面寫一堆我看不懂的專有名詞,感覺就是更新很多,這讓我更渾身不對勁,所以就是要更新!!!
打開U-center,選擇Tools/Firmware...
跳出視窗,第一個視窗選擇韌體的檔案,第三FIS選擇flash.xml,這個檔案放在U-center的目錄裡面。
按下OK後就開始刷刷刷!! 因為他用baudrate 9600在龜速更新,所以大概會要等10分鐘....等待時間我吃了兩塊蛋糕,有夠久的...
更新完後,M8N會跳回Baudrate 9600,所以U-Center請重新連接用9600連接
確認一下版本是否為3.01
要給多軸繼續使用,最基本三個選項要更改
首先Baudrate要改回38400
GPS的更新頻率請改回200ms,下面就會顯示為5.00 Hz
Dynamic Model請選擇Airborne 4g,Fix Mode選擇3-Auto 2D/3D
以上選擇完畢後,記得要儲存。
儲存後,裝上多軸測試一下....但個人不保證穩定,所以若沒冒險精神,請勿任意嘗試,畢竟飛機在天空飛,GPS出問題可是很大條的。











