其實組裝Pixhawk相對MWC來說,我覺得比較簡單,可能一方面有一點概念,另外一方面是3DR出廠都把線組做好了,所以幾乎只要找到地方插就好了,而且還有防呆不怕插反。
但這插頭非常脆弱,建議不要直接握住線硬拔,原廠建議用指甲在插頭左右邊慢慢板動。
馬達、電調的線路跟MWC一樣,所以這部份組裝可以參考之前文章。
Tarot的馬達安裝是用夾具方式,個人建議是如果可以就直接上螺絲膠,因為多軸在飛行過程中的震動傳導,很容易會讓螺絲鬆脫,雖然Tarot已經有防滑套保護,但個人經驗是還是會鬆,在飛行過程噴掉一邊馬達可不是開玩笑的,所以如果可以就上螺絲膠,雖然未來會變得很難拆,但總比摔機好。
如果你還是不想上螺絲膠,那就勤勞一點,在每次飛行前,把所有螺絲在檢查一次,尤其四軸的馬達部分,如下圖箭頭處。

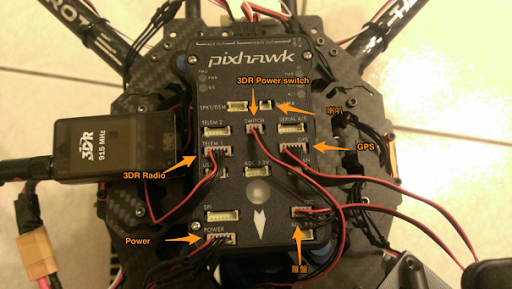
先從最簡單開始,3DR的GPS有兩組線,一組是GPS,一組是羅盤,羅盤就插到I2C的孔。
Radio插到TELEM1
3DR的Power switch插到SWITCH
3DR的喇叭插到BUZZER
以上,夠簡單吧!!
PPM encoder接法
Pixhawk可以用8個通道,CH1~CH4是已經制定好
CH1—>Roll
CH2—>Pitch
CH3—>Throttle
CH4—>Yaw
所以依照對應請接到RX1002的對應位置。
CH5是設定飛行模式,目前我是設定在GEAR的位置。這在後面會做說明,使用DEVO 10的一個三段開關+二段開關控制六種飛行模式。
CH6、7、8我依序接到RX1002上的AUX1、2、3,這也會在後面文章做說明。
PPM encoder的另外一頭就接到Pixhawk的RC接頭,黑色是負、紅色是正極、白色是訊號,Pixhawk有標示符號在旁邊,可以參考下一張圖。

PPM encoder的另一頭接到Pixhawk的RC接頭,如下圖,請注意線的順序。
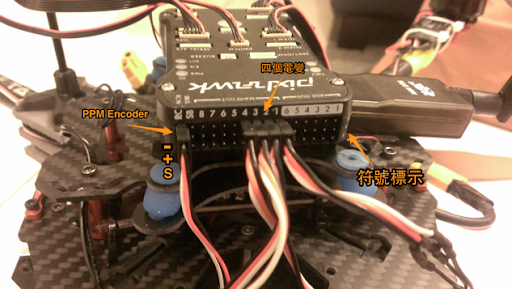
電變的接法請依照你的多軸配置,我的是X型,所以就依照下圖的1234位置接。
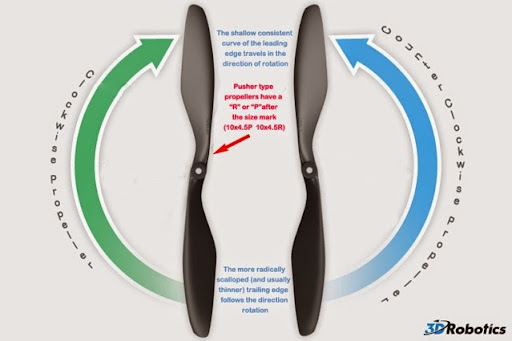
下圖也表示馬達的方向。順時鐘的馬達裝反獎,逆時鐘的裝正槳。

之前認為槳的正反槳辨識,通常上面會標示一個R或P字母,但這次買了幾組1555正反槳發現沒有字母...
沒有字母如何辨識正反槳,槳通常會有一邊是厚,一邊是薄的,槳的旋轉方向就是厚的在前,所以下圖的左槳,顏色比較深的是厚邊,所以這是順時針旋轉,這是反獎。
以上接好後,所有線路就大致完成了。
祝飛行順利
回覆刪除感謝!目前已經起飛完畢
刪除謝謝大大!!剛好對槳不了解,謝謝大大的分享
回覆刪除作者已經移除這則留言。
回覆刪除感謝大大詳細教學! 請問Devo10接收器的電源要由那裡供給呢? PPM編碼器照著大大教學連接Pixhawk是OK的,有看到上頭指示燈有亮起來. 但PPM編碼器<->RX1002 這端 ,除了那8條通道訊號線之外,我還有第9和第10條分別寫著(+5V) (GND)的線連接上RX1002,似乎沒有反應,這是不能從這邊供電的意思嗎?我是不是可以從Pixhawk的-+拉兩條線過來接上也是可以? 新手怕接錯會把東西搞壞, 還請指點,十分感謝!!>"<
回覆刪除你可以看倒數第4張圖,從PPM編碼器到RX1002接收器只有一組通道有一條紅線跟黑線,那就是從PPM編碼器供電給RX1002,每一個通道都有三條線,正、負極跟訊號線,只要從8個通道隨便挑選一組,接上正負極就可以供電給RX1002
刪除作者已經移除這則留言。
刪除謝謝版大! 後來試了一下, 發現直接從Pixhawk RC那端供電RX1002是正常的... 回到正常接法下,PPM編碼器本身會亮,不過從PPM編碼器的+5V那邊接入RX1002接收器,依然毫無反應. 由於小弟購買的為整套的副廠飛控裝置, 是不是有些PPM編碼器需要特別焊接才可令其直接供電至遙控接收器呢? (http://goods.ruten.com.tw/item/qa?21001093264907#qna) 受益良多,謝謝版大^w^!
刪除賣場有寫了...
刪除"供電選擇:
1. 默認供電方式:PPM編碼器由飛控供電,本身電源不與接收機相連;
2. 焊接板上的跳線,可讓接收機也可以從PPM編碼器獲得電源,請根據實際需要選擇供電方式。
"
默認編碼器只有受電,沒有供電.......你要從PPM供電給RX1002要焊接跳線
恩恩,怕解讀錯誤是以再次請問. 敝人非電子專長, 因本著對多軸飛行器的喜好踏入DIY領域(從V353玩具機->Pixhawk六軸 自知越級打怪啊@口@~!), 電的東西一不小心就是燒燬買經驗, 問題笨了些還請莫見怪! 日後組成順利飛行定要回來再次感謝版大的 :)
刪除請問為什麼從電變來的杜邦接頭不用像Multiwii一樣挑掉紅線呢?
回覆刪除因為MWC的硬體版本是開源,很多版本,有偷料的,你不挑掉紅線全插上去,就會燒掉板子,但也有MWC板子是可以全插的,在使用者都不了解自己的板子前提下,安全起見就會建議挑掉紅線,只插一組。Pixhawk的硬體用料實在,所以不用擔心這一點。另外就是電變,有些版本無BEC的版本,紅線是沒有通電的,但廠商都還是會把紅線焊上,所以插上去也都沒差,因為根本沒過電。
刪除喔喔了解!
刪除謝謝你那麼快就回覆:)