
之前說的Pixhawk 650軸距四軸大致已經組好,最近都在調整階段,未來會補上教學文章,Pixhawk的設定相對MWC複雜許多,必須擷取取多圖,所以需要一段時間整理。
這篇先教學433增程,何謂433增程?
之前提到使用遙控器是DEVO 10 2.4G,2.4G這頻段特性是距離短、穿透力低,在加上目前許多電子設備都往這頻段擠,例如家裡的Wifi、數位電話,所以造成2.4G這頻段擁擠,很多3C設備現在也開始避開這頻段往5.8G頻段,所以市面上很多Wifi基地台也開始使用5.8G,主要原因就是2.4G太多設備使用,干擾太大。
FPV的流行,很多人多軸追求長距離遙控,但因為2.4G遙控器距離限制,所以有所謂433增程,簡單說就是把原本2.4G換成433MHz頻段。433MHz頻段特性是傳輸距離遠、穿透力強,雖然目前433MHz在民間無線電也在使用,但這可以透過跳頻和軟體通訊解決,所以目前干擾問題可以忽略。使用433MHz可以讓遙控距離輕鬆達到公里等級,如果場地開闊,數十公里也沒問題。
433MHz增程使用下面圖案說明
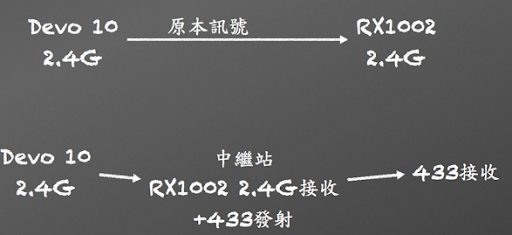
原來作法:
使用DEVO 10發射2.4G訊號到多軸上面的RX1002 2.4G接收器。
433增程作法:
把DEVO 10 2.4G訊號先發射到中繼站,中繼站裡面的RX1002接收2.4G訊號後,透過實體線路傳送到433MHz發射器發射到多軸機上的433MHz接收器。
使用這種作法必須新增一組433MHz發射器跟接收器,目前推薦使用OrangeRX的TX/RX,簡稱大橘子。我是從HobbyKing購買,TX是$30美金,RX是$20美金。
但在台灣使用無線電需要有無線電業餘執照,我也特地去NCC考了一張業餘執照,但433好像不在這範圍內XD,考開心的,哈。


軟體部分,使用OpenLRSng去刷,它的刷機工具使用Chrome extension方式,所以使用瀏覽器Chrome去這網址下載並安裝。
首先要準備一個FTDI來刷機,這在之前教學MWC GPS設定有提到
非常重要!!!非常重要!!!非常重要!!!非常重要!!!
大橘子的FTDI只能用3.3V!!請勿接上5V,會燒毀!!!
如果你用的FTDI是跟我下面那張圖一樣,請注意中間部分有三個點,這三個pin腳可以控制FTDI輸出電壓,預設通常是5V,所以我用切割刀讓5V pin跟中間pin點割開,並焊上3.3V pin點,這樣FTDI就是3.3V輸出! 如果不確定FTDI電壓,請用三用電錶量測VCC/GND腳位。

在把FTDI插上去之前,另一件重要注意事項!請隨時保持天線插上!!!請隨時保持天線插上!!!
因為這是1W發射器,沒有接上那根粗粗天線,會造成發射晶體燒毀,所以個人建議隨時保持插上狀態在通電。
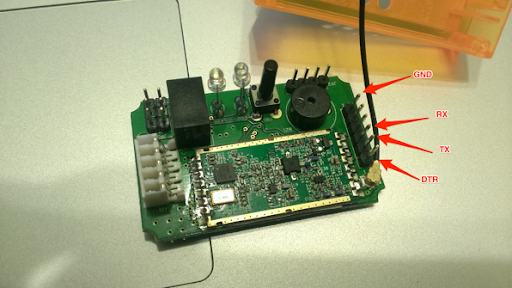
把大橘子的外殼拆開,靠近天線部分是DTR腳,背面電路板上其實都有印刷,大家拿到手可以自行檢查比對。
對應上圖的FTDI的腳位,插上去即可。
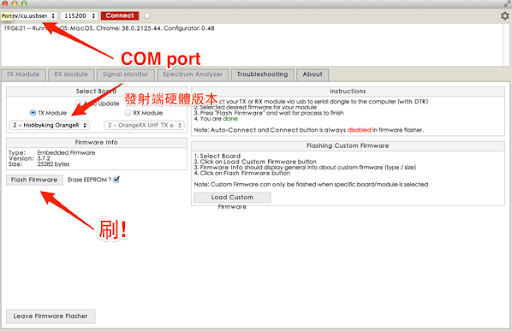
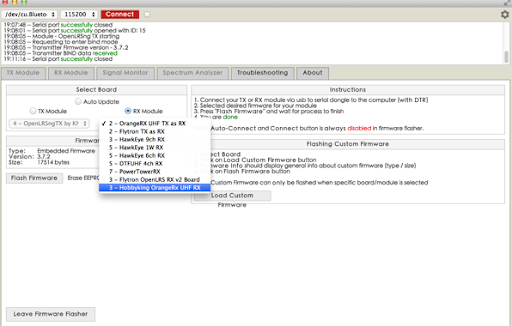
打開設定軟體,選擇 “Firmware Flasher”

1.確認COM port是正確
2.選擇硬體版本,大橘子是HobbyKing OrangeRx UHF TX
3.確認網路是通的,按下Flash Firmware就開始刷了!!
刷完發射端,改刷接收端,一樣確認動作
1.確認FTDI的腳位是對的嘛? 靠近天線位置是DTR,如果不放心可以轉到背面,電路板上也都說印刷腳位名稱。
2.確認FTDI是3.3V
3.確認粗粗的天線有接上

以上步驟確認無誤後,開啟刷機工具,步驟跟刷發射端一樣,只是硬體版本改選為HobbyKing OrangeRx UHF RX
刷完以上步驟後,你的大橘子發射端和接收端軟體部分就大功告成。
接下來是線路組裝部分,最前面提到”中繼站”,我們必須建立一個中繼站來負責轉發訊號
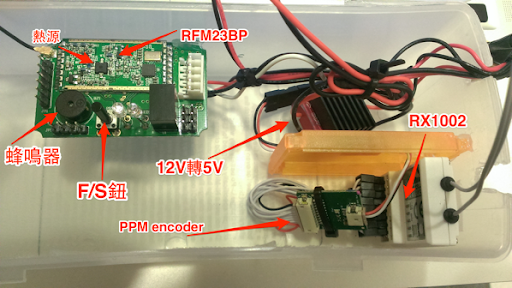
這是我用電池的盒子改裝的醜醜中繼站,從最左邊依序是433MHz發射天線、12V風扇、電壓表、RX1002天線。先解釋為何要風扇和電壓表,因為發射端是1W,所以會產生一定熱能,建議使用風扇幫助善熱。電壓表是監控中繼站電池電量,避免飛到一半中繼站沒電。

上面提到中繼站負責把原本RX1002訊號透過實體線路傳送到433MHz發射端,那透過何種實體線路呢?這時候我們需要一個PPM encoder。在組裝Pixhawk我們有提到這個東西,因為新的遙控器都開始支援PPM訊號,但RX1002不支援PPM,所以需要這個PPM encoder把RX1002上面密密麻麻的腳位訊號轉成一條線PPM訊號,而剛好大橘子刷機後也只支援PPM訊號。
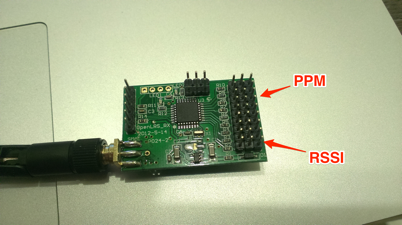
簡單說如下圖,PPM右邊的八個pin腳接到右邊RX1002,等於把RX1002的8動訊號轉接成左圖的左邊PPM一組線訊號。
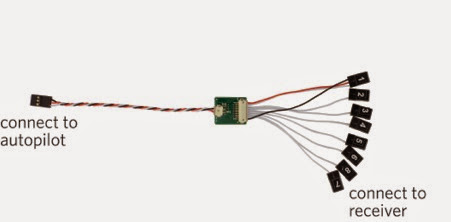

把Encoder的白色PPM訊號線單獨接到大橘子的PPM腳位。
注意!!
大橘子運作電壓建議是12V,但PPM encoder跟RX1002是5V電壓,所以中繼站裡面必須有兩種電壓。
5V正副極接到PPM的黑紅線
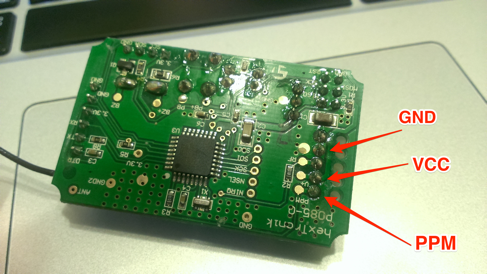
12V的正副極接到大橘子下圖的VCC/GND
雖然1W發射端接上5V可以運作,但建議使用足瓦的電壓12V去使用,避免低電壓造成設備自行啟動。官網建議1W發射端運作電壓是6.8V~12V。
而100mw接收端,官網建議是3.7V~15V,所以使用5V是足夠的,如果不放心一樣可以使用12V。
下圖就是我完成的中繼站盒內狀況,放置一個12V轉5V BEC,5V拿來供應PPM encoder,PPM encoder在供應5V電給RX1002。
12V則直接供應大橘子發射端電源。
風扇建議直接對蜂鳴器上面那區塊吹風,主要熱源是那塊RFM23BP。我有嘗試加散熱片上去,但難度太高,發熱源點就是F/S按鈕往上對上去那一小塊黑色晶體,高度不高,所以要頂住散熱片是一個問題,而周邊又一堆電阻,散熱片可能會誤觸導致短路,所以最簡單作法還是推薦是用風扇直接散熱。
以上中繼站完成,接下接收端就簡單了。
透過軟體設定,大橘子接收端pin 1是RSSI訊號線,pin6是PPM輸出,所以我們只要把PPM訊號接到飛控板上的PPM輸入即可。

以上硬體部分全部完成,接下來是軟體設定。
把中繼站拿出來,確定線路都正確,接上12V電源,在把FTDI 3.3V拿出來接上大橘子發射端的FTDI接腳。
打開OpenLRSng設定軟體,確認COM port有偵測到,按下Connect之後出現發射端的畫面。
點一下右上角的Randomize產生亂數跳頻參數,在按下右下角的Save to EEPROM儲存。

完成上面步驟後,發射端的軟體設定完成,接下來要設定接收端,但接收端設定方式跟發射端不一樣,他是透過發射端去連接接收端,而不是直接透過FTDI接上接收端。所以在此之前,我們必須讓這組發射端跟接收端對頻。
對頻方式:
1.先讓發射端斷電,同時接收端也斷電,FTDI都不要接。
2.持續 按住發射端上面Fail Safe按鈕
3.發射端上電
4.約等待5秒聽到逼逼聲放開Fail Safe按鈕,並確認發射端持續發出逼逼聲。請勿按住超過10秒。
5.確認發射端持續發出逼逼聲代表進入對頻狀態,這時候把接收端上電,發射端連續逼逼聲會停止,這就代表對頻完成。
對頻完成後就可以開始設定接收端,這時候先把接收端斷電,把FTDI接上發射端,打開OpenLRSng設定工具,並連接。
點選RX module,出現提示等待連接接收端,這時候把接收端上電。
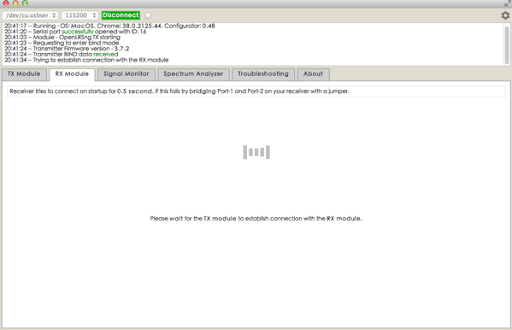
因為剛剛有對頻過,所以接收端上電會自動配對完成,RX Module也會自動轉變如下圖畫面,我設定Port 1是RSSI腳位,Port 6是PPM腳位,設定完成後記得點選右下角Save to EEPROM。
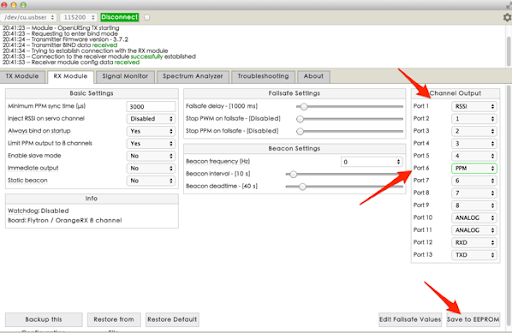
右邊一整排針對應上面軟體畫面的Port 1~9,可以依照自己喜愛變換不同功能,但我主要會用到PPM跟RSSI而已。
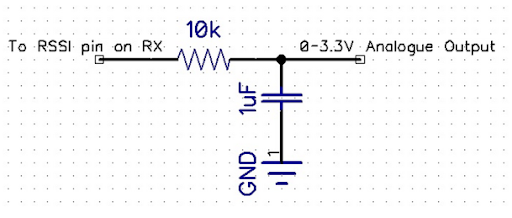
RSSI接腳主要是可以輸出目前橘子的訊號強度,像我使用FPV飛行,透過螢幕顯示出現在訊號強度。因為橘子的訊號輸出是高頻的PWM訊號,飛控無法解讀,所以OpenLRSng官網有推薦一個方式。
使用一個10k電阻跟1uF電容,就可以把訊號轉為0V-3.3V Analog 訊號,以我的Pixhawk飛控板為例就可以正常判斷RSSI強度。
下圖左邊的線就是接到橘子接收端的RSSI 訊號腳,右邊接到飛控板。
Pixhawk的使用者也要記得把參數 RSSI_PIN改成103,也就是SBUS的pin腳。
透過上面的low pass filter,RSSI_RANGE也要改成3.3讓Pixhawk知道RSSI的範圍。

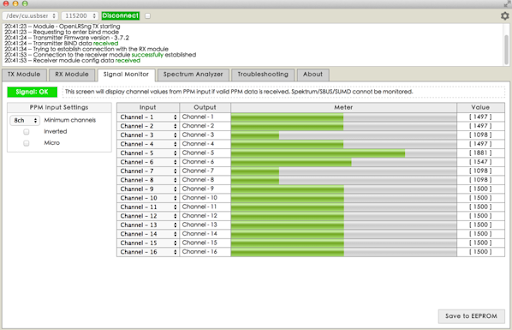
設定完接收端後,打開DEVO 10,如果整個訊號串連起來,點選OpenLRSng設定工具中的Signal Monitor會出現下圖畫面,控制DEVO 10幾個搖桿就可以看到PWM的訊號在畫面上增減。
以上步驟就是整個433增程功放的設定,使用1W的發射端搭配100mw的接收端。
但是!!!
OpenLRSng還有一個特異功能,它可以讓1W的發射端變成1W的接收端,我未來也會朝這方向去做,所以我一次購買兩組發射兩組接收XD
發射跟接收都是1W功率,可以讓距離更遠,但除非你有特殊需求,不然其實個人建議發射1W/接收100mw就足夠使用,因為當你裝一個1W接收端在多軸上面,可能會影響其他電子設備,例如圖傳、GPS、OSD干擾紋。
網路上也有人修改OpenLRSng,讓大橘子除了轉送遙控訊號,也同時傳送數傳訊號,簡單說就是透過一組天線發射兩組訊號,這樣多軸上面的915MHz圖傳發射器又可以省下來了!!
有興趣可以參考此網頁。
真感謝大大的分享 ...收穫很大
回覆刪除(1) 如果這是雙向需要溝通...是否兩邊都要用1W 來處理?
(2) 中繼站發射晶體熱源問題..是否考慮用大散熱片黏上導熱固定膠處理 省去電風扇(干擾)
1.如果你要用雙向溝通,例如圖傳,那就建議真的使用flipflap的版本,我最後一行的連結就是flipflap。
回覆刪除2.因為那熱點非常小,我個人是不知道怎黏。重點是預防旁邊的短路。
感謝版主的分享 真的讓我收獲許多
回覆刪除想請問 版主用的FPV設備 是選哪一種的!?
因為網路上有許多的FPV設備,但卻不知要選哪一種的~
麻煩您了
如果是分開,螢幕沒有內建接收,圖傳5.8G 我用BOSCAM TS832/RS832 600mw,也有人推薦使用ImmersionRC的。
刪除如果是螢幕內建在一起,大多看到推薦是鷹眼系列。
摁摁 了解了 那想問問 在所得FPV等訓好都正常接收到 那能飛得多遠?! 飛得多久的時間?!
刪除我在想說 你的電池是買6S 5000mAh的電池 怎不買更大容量的電池,這樣可以飛得更久
麻煩您了!
外國測試約5~8公里,但我沒測過這麼遠,地點不多,可能只能往太平洋飛吧XD目前我多軸可以飛約20到30分鐘。電池沒空間放,所以才用5000, 未來會考慮並聯兩顆
刪除先感謝大大的分享!
回覆刪除請教一下Pixhawk的設定跟APM都是用MP的,那設定程序上有大分別嗎?
原本就想買個APM回來玩玩看,但見到大大的文章,想轉玩Pixhawk了
大大您好,感謝您的分享,收益良多!
回覆刪除我想請問是否能將遙控訊號、數傳與圖傳訊號皆以大橘子1W發射/1W接收同時傳送呢?
謝謝您!
圖傳不可能一起,頻寬不夠。
刪除遙控跟數傳可以一起傳送。